Hardware y Adquisición de Datos
Mecánica, electrónica y sensores del prototipo físico.
Descripción General
El prototipo consiste en un carro deslizante sobre una guía lineal de aluminio, actuado por un motor DC mediante correa dentada. Un péndulo articulado se monta sobre el carro, y su ángulo se mide con un encoder rotatorio de alta resolución.
El sistema fue diseñado, fabricado e instrumentado íntegramente por el equipo, incluyendo piezas impresas en 3D (PLA) en color rojo para el carro y el soporte del encoder.
Fotografías del Prototipo
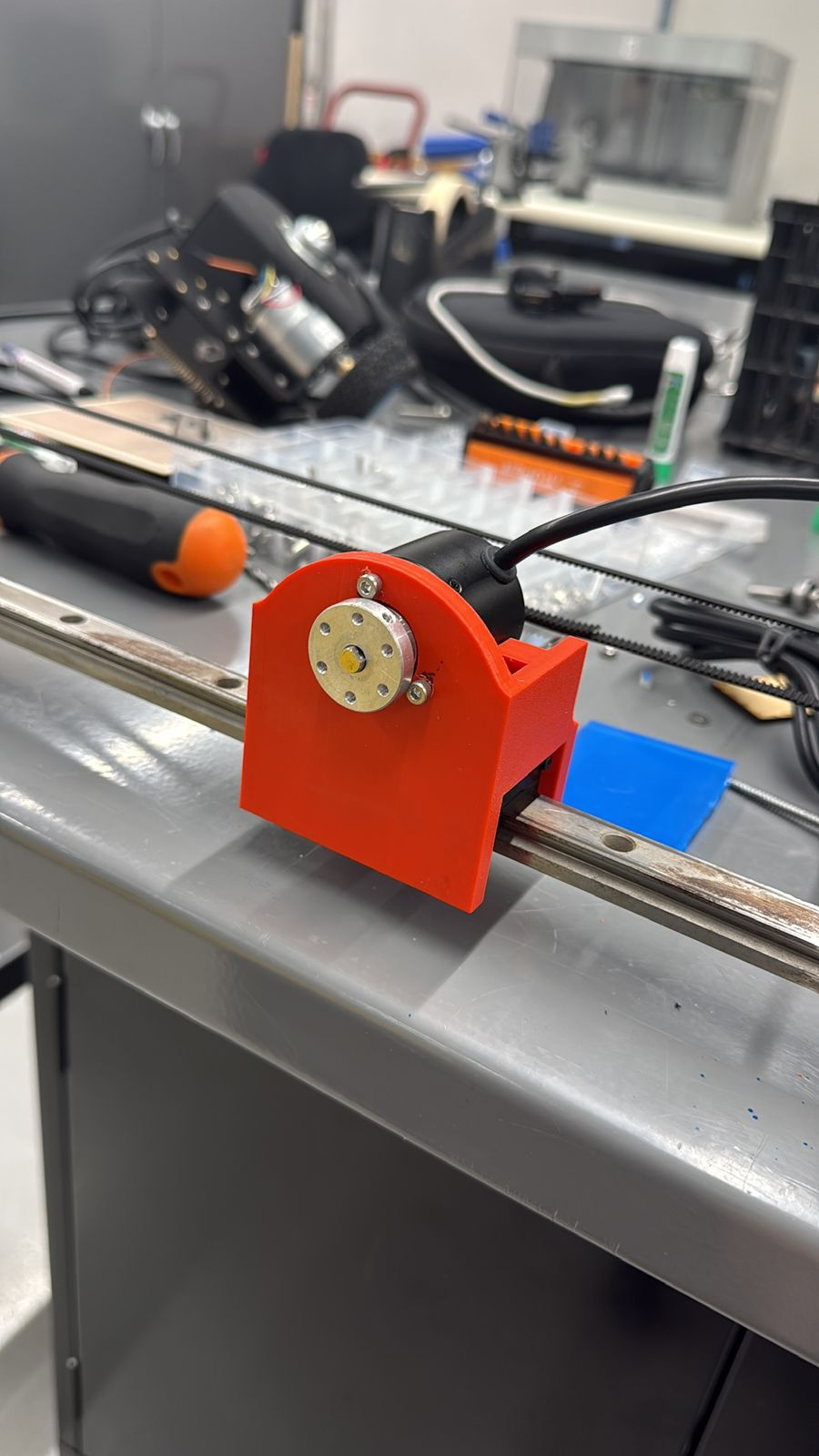
Encoder rotatorio de alta resolución montado en el carro impreso en 3D (PLA rojo) sobre la guía lineal.

Vista general del sistema: guía lineal de ~1 m, carro motorizado con correa dentada y péndulo articulado.

El equipo durante las sesiones de desarrollo y prueba en el laboratorio de electrónica de la IBERO.
Lista de Materiales (BOM)
| Componente | Especificación | Cantidad |
|---|---|---|
| Guía lineal | Perfil de aluminio, ~1 m | 1 |
| Motor DC | Con driver PWM | 1 |
| Correa dentada | GT2, paso 2 mm | 1 |
| Encoder rotatorio | Alta resolución (péndulo) | 1 |
| Encoder lineal / odómetro | Posición del carro | 1 |
| Carro impreso en 3D | PLA rojo, diseño propio | 1 |
| Microcontrolador | Arduino (ver código fuente) | 1 |
| Driver de motor | Puente H | 1 |
| Fuente de alimentación | 12 V DC | 1 |
| Estructuras de soporte | Aluminio perfilado | 2 |